However, there is an alternative arrangement of magnets in the rotor that, according to many a forum post all over the internet, will significantly increase the torque density of any motor.
The Halbach array
 |
| Credit: Wikipedia |
Four different scenarios for a simple motor model
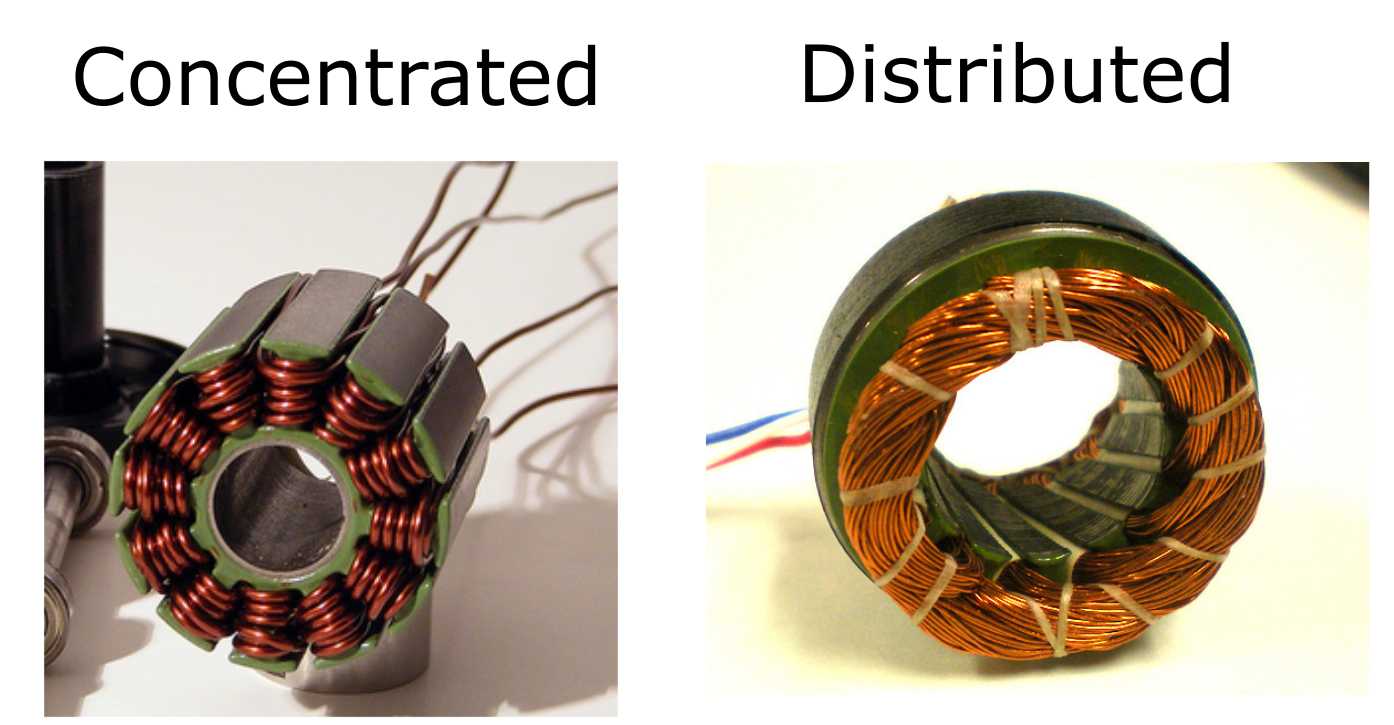
While more details regarding this motor can be found in this post a brief description is as follows: It is a 6 slot, 8 pole motor with three phases wound as concentrated windings in a pattern of ABCABC. All current in the windings is on the q-axis and in this case there is a 4.5 mm flux gap with 4 mm long magnets. FEMM simulation results shown below.
Back iron only
Torque output: 0.714 N.m

Back iron and Halbach
Torque output: 0.714 N.m

Halbach Only
Torque output: 0.683 N.m

Neither back iron or Halbach
Torque output: 0.435 N.m
It's clear that adding a Halbach style arrangement of magnets to the rotor has no impact on the torque produced when back iron is also used. However, it makes a considerable difference when the rotor back iron is removed, giving roughly 50% more torque than the non-Halbach arrangement.
A simplified example
The reason for this is clear when you look at a simplified arrangement of magnets.
 |
| Back iron only |
 |
| Back iron and Halbach |
 |
| Halbach Only |
 |
| Neither back iron or Halbach |
The back iron produces a high magnetic permeability path for the permanent magnet 'flux' to pass through. The use of a Halbach array eliminates the need for back iron and so the use of both a Halbach array and back iron will only increase the cost and weight of a motor, with no improvement in performance.
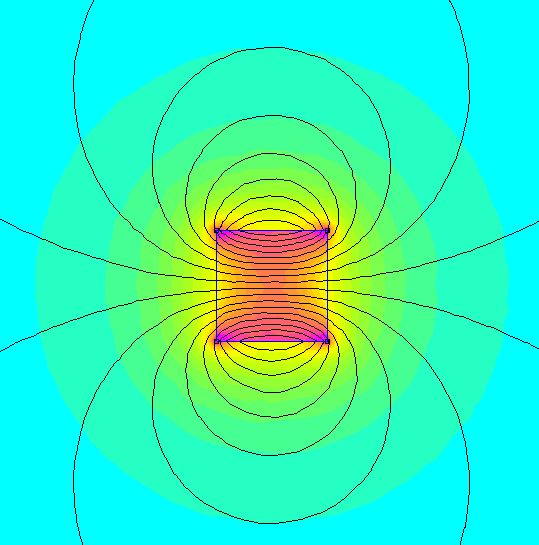
If we draw a downwards line from the surface of the exposed magnets in the images above and plot the flux density at each point we see the following.

It is clear that the flux density is the same with or without the Halbach configuration provided that back iron is used. Therefore, a Halbach array does not act to redirect the flux from one side of a magnet, concentrating it on the other, as is sometimes stated. Therefore, it only makes sense to use a Halbach array when designing a motor which has no 'back iron' in the rotor. However, having no back iron in the rotor is essentially the same as having an infinite flux gap. As was shown in the last post, the highest torque density was achieved for our model motor when the flux gap was kept small using thin magnets. So not only would a Halbach configuration for this motor be considerably more expensive to manufacture, it would also have a lower torque density.
If we draw a downwards line from the surface of the exposed magnets in the images above and plot the flux density at each point we see the following.

It is clear that the flux density is the same with or without the Halbach configuration provided that back iron is used. Therefore, a Halbach array does not act to redirect the flux from one side of a magnet, concentrating it on the other, as is sometimes stated. Therefore, it only makes sense to use a Halbach array when designing a motor which has no 'back iron' in the rotor. However, having no back iron in the rotor is essentially the same as having an infinite flux gap. As was shown in the last post, the highest torque density was achieved for our model motor when the flux gap was kept small using thin magnets. So not only would a Halbach configuration for this motor be considerably more expensive to manufacture, it would also have a lower torque density.
There are of course exceptions to this example. Completely core-less electric motors (no stator or rotor iron) such as this example often use Halbach arrays as a means to increase their otherwise terrible torque density. The benefit to this design is that the lack of iron core losses means that these motors can be quite efficient provided eddy currents in the windings and magnets is adequately controlled. They also produce no cogging torque. As far as I can tell, core-less motors are also popular among hobbyist because they eliminate the need to cut your own Fe-Si steel lamination. If you are looking to make a one off custom motor as a hobbyist my advice would be to re-use an off the shelf stator (either new or from a donor motor) and modify it to your own needs. This approach will always give you a higher torque density than a core-less motor and will often be cheaper since you don't need to purchase as many, or as large, expensive magnets or litz wire for the windings.